LAPORAN PRAKTIK KERJA INDUSTRI (PRAKERIN)
DI
MULTI TEKNOLOGI LAMPUNG
ROBOT LIGHT FOLLOWER
SEDERHANA
Diajukan dalam rangka
Melengkapi persyaratan
Mengikuti ujian akhir sekolah dan ujian nasional
Disusun Oleh :
Nama :
RAFI NUANSAH
Kelas :
XII
Program Studi Keahlian : Teknik Elektronika
Kompetensi Keahlian : Teknik Elektronika Industri
SEKOLAH MENENGAH KEJURUAN (SMK) NEGERI 1 NATAR
KABUPATEN LAMPUNG SELATAN
TAHUN PELAJARAN. 2015/2016
Jl.
Inpres Sumbersari Desa Mandah Kec. Natar Lampung Selatan
|
SEKOLAH MENENGAH KEJURUAN (SMK) NEGERI 1 NATAR
KABUPATEN LAMPUNG SELATAN
BIDANG STUDI KEAHLIAN TEKNIK ELEKTRONIKA INDUSTRI
Alamat : Jl. Sumbersari Desa Mandah,
Natar Lampung Selatan 35354
Telp. 082880439400
HALAMAN
PENGUJI
Laporan
hasil program Praktek Kerja Industri
Telah
di uji pada tanggal : …………………………………..
KETUA PROGRAM KEAHLIAN PENGUJI
TEKNIK ELEKTRONIKA
(Rinelda,
S.T., M.Pd.T) (Hendry
Kurniawan, S.Pd)
NIP: 19770819
200902 2 001 NIP: 19730415 200012 1 001
HALAMAN PENGESAHAN
Judul Laporan :
ROBOT
LIGHT FOLLOWER SEDERHANA
Telah Di Sahkan pada tanggal
:……………………………..
Menyetujui,
Pimpinan/ Direktur Guru
Pembimbing Industri
Handri
Supriadi, A.Md Pujar Diki,
S.Kom
KEPALA SMK NEGERI 1 NATAR Guru Pembimbing
M. TAUFIQ, S.Pd
Rinelda,
S.T., M.Pd.T
NIP
: 19680605 200012 1 002 NIP:
19770819 200902 2 001
MOTTO
Menganalisa
terlebih dahulu sebelum melakukan
Hadapi
hidupmu dengan senyum, apapun yang terjadi semua ada hikmahnya dan kebahagiaan lah
yang menunggu dibelakangnya
Orang-orang
pintar pada hari ini adalah orang-orang yang dahulunya giat belajar dan tidak
putus asa bila menghadapi kesulitan
Jangan
pernah menyerah dan lakukan segala sesuatu yg bisa kau lakukan
Tekun,
jujur, ulet, disiplin, dan do’a orang tua adalah kunci kesuksesan kita
Waktu
tidak dapat dibayar dengan harta, sebab orang terkaya sekalipun tidak bisa
membeli waktu, karena setiap orang mempunyai jatah jam menit yang persis sama,
karena itu manfaatkan waktu anda sebaik mungkin
PERSEMBAHAN
Laporan Praktik Kerja
Industri (Prakerin) yang dilaksanakan di LPTK Mutekla (Multi Teknologi Lampung)
berupa karya tulis paper, dengan penuh rasa syukur dan bangga saya persembahkan
kepada:
1. Ayah
dan ibu tercinta yang telah memberikan semangat dan dukungan yang tak pernah
lelah dan tak henti – hentinya mendoakan dan membimbingku dengan berupa bekal
moral dan material dalam mengikuti kegiatan prakerin ini.
2. Bapak kepala sekolah SMKN 1 Natar.
3. Ibu
Rinelda, S.T., M.Pd.T selaku Pembimbing Prakerin.
4. Sdr.
Handri Supriadi selaku pemimpin Perusahaan.
5. Sdr.
Pujar Diki selaku Pembimbing Perusahaan.
6. Teman
– temanku yang selalu memberikan motivasi semangat dalam menuntut ilmu agar
lebih giat belajar.
7. Dan
Semua pihak yang telah membantu dalam
menyelesaikan laporan Praktik Kerja Industri ini.
KATA
PENGANTAR
Syukur
Alhamdulillah saya panjatkan atas kehadirat Allah SWT., yang telah melimpahkan rahmat
dan hidayah-Nya, Sehingga saya dapat melaksanakan kegiatan Praktik Kerja
Industri (Prakerin) selama 3 bulan yang berlangsung dari tanggal 22 Juni 2015
s/d 17 September 2015 di Mutekla (Multi Teknologi Lampung). Dan pada kesempatan
ini saya bermaksud menyampaikan hasil kegiatan saya dalam bentuk Laporan Praktik
Kerja Industri (Prakerin).
Dengan adanya penyusunan
laporan ini saya bermaksud untuk memenuhi persyaratan mengikutin UAS (Ujian
Akhir Sekolah) dan UN (Ujian Nasional) Tahun Pelajaran 2015/2016 SMKN 1 Natar.
Pelaksanaan Prakerin ini dapat mendorong siswa untuk mengaplikasikan ilmu yang
diperoleh kedalam dunia kerja. Sesungguhnya kami menyadari bahwa pelaksanaan
program dan penyusunan laporan ini tidak dapat diselesaikan dengan baik tanpa
orang – orang disekeliling kami.
Oleh karena itu,
pada kesempatan ini kami mengucapkan terima kasih kepada semua pihak yang telah
memberikan bantuan dan partisipasinya baik dalam bentuk moril maupun material
demi kegiatan yang kami laksanakan khususnya kepada :
1. Allah
SWT., yang telah memberikan rahmat dan hidayah-Nya sehingga kami dapat
menyelesaikan Prakerin dan menyusun laporan ini hingga selesai.
2. Kedua
Orang Tua kami yang telah memberikan kami support dan motivasi agar selalu giat
dalam belajar dan menuntut ilmu setinggi mungkin.
3. Bapak
M. Taufiq, S.Pd sebagai kepala sekolah SMKN 1 Natar.
4. Ibu
Rinelda, S.T., M.Pd.T selaku guru pembimbing Prakerin yang mana telah
membimbing, membantu dan memberikan saran kepada kami.
5. Seluruh
Dewan Guru SMKN 1 Natar.
6. Handri
Supriadi sebagai Pemimpin Perusahaan Mutekla.
7. Sdr.
Pujar Diki sebagai pembimbing di tempat Prakerin.
8. Seluruh
karyawan Mutekla.
9. Dan
kepada seluruh pihak yang telah banyak membantu, yang tidak bisa kami sebutkan
satu persatu.
Saya selaku
penulis, menyadari bahwa laporan ini masih jauh dari kesempurnaan. Oleh karena
itu, saya selaku penulis sangat mengharapkan adanya masukan, baik saran maupun
kritik yang bersifat membangun dari semua pihak.
Akhir kata, saya
selaku penulis mohon maaf yang sebesar – besarnya apabila dalam penyusunan
laporan ini terdapat banyak kesalahan. Semoga laporan ini dapat bermanfaat,
khususnya bagi saya sendiri selaku penulis maupun pembaca.
Natar, 07 September 2015
Penulis
Rafi Nuansah
DAFTAR ISI
HALAMAN
JUDUL................................................................................. i
HALAMAN
PENGESAHAN.................................................................. ii
HALAMAN
PENGUJI............................................................................ iii
MOTTO.................................................................................................... iv
PERSEMBAHAN..................................................................................... v
KATA
PENGANTAR............................................................................. vi
DAFTAR
ISI.......................................................................................... viii
DAFTAR
GAMBAR................................................................................ x
DAFTAR LAMPIRAN.......................................................................... xiii
DAFTAR
TABEL.................................................................................. xiv
BAB I PENDAHULUAN
A. Latar
Belakang Praktek Kerja Industri.......................................... 1
1. Pengertian
Praktek Kerja Industri............................................ 1
2. Tujuan
Praktek Kerja Industri.................................................. 2
3. Tujuan
pembuatan laporan....................................................... 4
4. Landasan
Praktek Kerja Industri............................................. 5
5. Batasan
Masalah...................................................................... 5
6. Metode
Penulisan Laporan...................................................... 6
7. Sistematika
Laporan.................................................................7
8. Peserta
Praktek Kerja Industri................................................. 9
B. Deskripsi
Perusahaan.................................................................................9
1. Profil
Perusahaan.....................................................................9
2. Sejarah
Perusahaan................................................................. 11
3. Visi
dan Misi.......................................................................... 13
4. Struktur
Organisasi Perusahaan............................................. 14
5. Produksi
dan Jasa................................................................... 15
6. Lokasi
Perusahaan.................................................................. 16
BAB II TEORI DASAR
A. Pengertian
Robot light follower sederhana............................................. 17
1. Jenis
Robot Berdasarkan bentuknya...................................... 17
B. Tahap
– tahap Pembuatan Robot Light Follower.................................... 19
C. Prinsip
Kerja Robot Light Follower........................................................ 19
1. Komponen
Sensor.................................................................. 20
2. Komponen
Prosessor.............................................................. 22
3. Transistor................................................................................ 23
4. Dynamo.................................................................................. 24
5. Trimpot................................................................................... 24
BAB III MERAKIT ROBOT LIGHT FOLLOWER SEDERHANA
A. Alat
dan Bahan........................................................................................ 25
1. Alat........................................................................................ 25
2. Bahan..................................................................................... 33
B. Langkah
Pembuatan Robot Light Follower............................................ 41
BAB IV PENUTUP
A. Kesimpulan............................................................................................. 46
B. Saran...................................................................................................... 46
DAFTAR PUSTAKA........................................................................... 47
LAMPIRAN........................................................................................... 48
DAFTAR GAMBAR
Gambar
1.1 Ruko Bangunan
LPTK Mutekla Yang
Lama....................... 12
Gambar
1.2 Ruko Bangunan
LPTK Mutekla Yang
Baru........................ 12
Gambar
1.3 Struktur Organisasi LPTK Mutekla..................................... 14
Gambar 1.4 Denah Lokasi Perusahaan.................................................... 16
Gambar
2.1 Blok Diagram....................................................................... 19
Gambar
2.2 Skema Rangkaian................................................................. 19
Gambar
2.3 Sensor Photodiada............................................................... 21
Gambar
2.4 Op – Amp Sebagai komparator............................................ 22
Gambar
2.5 Bagian Penguat dan Pembanding (Komparator)................. 23
Gambar
2.6 Rangkaian Switching pada IC dan Motor........................... 23
Gambar
3.1 Obeng + dan Obeng –.......................................................... 25
Gambar 3.2 Multitester
Analog............................................................... 26
Gambar 3.3 Multitester
Digital................................................................ 27
Gambar
3.4 Solder................................................................................... 27
Gambar 3.5 Atraktor................................................................................ 28
Gambar 3.6 Pinset.................................................................................... 29
Gambar
3.7
Tang Kombinasi................................................................... 29
Gambar
3.8
Penggaris Baja...................................................................... 30
Gambar 3.9 Tang potong......................................................................... 30
Gambar 3.10 Tang Pengupas................................................................... 31
Gambar 3.11 Tang jepit............................................................................ 31
Gambar 3.12 Bor...................................................................................... 32
Gambar 3.13 Lem bakar........................................................................... 33
Gambar 3.14 Timah Solder...................................................................... 33
Gambar 3.15 PCB Bolong
dan PCB Polos.............................................. 34
Gambar 3.16 Resistor............................................................................... 35
Gambar 3.17 Acrylic................................................................................ 37
Gambar 3.18 Fotodioda........................................................................... 37
Gambar 3.19 Motor DC........................................................................... 38
Gambar
3.20 LED (Light Emitting Dioda)............................................. 38
Gambar
3.21 Socket IC........................................................................... 39
Gambar
3.22 Trimpot............................................................................... 39
Gambar
3.23 Header Male....................................................................... 40
Gambar 3.24 Konektor Black Housing Dan
Konektor Putih.................. 40
Gambar 3.25 skema rangkaian robot light follower
sederhana................ 42
Gambar
3.26 Contoh layout tampak
atas dan tampak bawah................. 42
Gambar
3.27 Contoh layout tampak
atas dan tampak bawah yang sudah
dimirror.................................................................................................... 43
Gambar
3.28 Membuat PCB dengan di setrika...................................... 43
Gambar
3.29 Mengebor PCB................................................................... 44
Gambar
3.30 Memasang atau
Menyolder Komponen............................. 44
Gambar
3.31 Robot
yang telah disatukan............................................... 45
Gambar
3.32 Uji Coba............................................................................. 45
DAFTAR TABEL
Tabel 1.1 Peserta Praktik Kerja Industri.................................................... 9
Tabel 3.1 Transistor.................................................................................. 35
Tabel 3.2 IC (Integrated Circuit)............................................................. 36
DAFTAR LAMPIRAN
Gambar
Membuat PCB............................................................................ 48
Gambar
hasil Layout PCB....................................................................... 48
Gambar
hasil pemasangan komponen dan pemasangan kerangka pada
robot......................................................................................................... 48
Gambar
IC dan Datasheet IC.................................................................. 49
Daftar
Nilai.............................................................................................. 50
BAB I
PENDAHULUAN
A.
Latar
Belakang Praktik Kerja Industri (Prakerin)
Pada perkembangan teknologi saat ini dan pasar bebas sekarang ini
maka persaingan tenaga kerja semakin ketat. Guna mengisi lapangan kerja yang
ada maka dibutuhkan tenaga kerja yang professional, berkualitas, terampil, disiplin, jujur dan
bertanggung jawab.
Maka dari itu program Prakerin bisa membuat suatu Link and Match antara sekolah dengan dunia usaha/industri. Industri akan
memberikan suatu standar kompetensi untuk tenaga teknisnya dan sekolah berupaya
memberikan ilmu sesuai dengan standar kompetensi yang diinginkan industri. Jika
terjadi Link and Match maka lulusan SMK akan banyak diserap oleh dunia usaha dan
industri.
1.
Pengertian Praktik Kerja Industri (Prakerin)
Pendidikan di sekolah menengah kejuruan (SMK) ditempuh
dengan dua cara yaitu pendidikan di sekolah dan pendidikan diluar sekolah.
Pendidikan didalam sekolah merupakan pendidikan yang dilakukan oleh guru atau
instruktur, sedangkan pendidikan diluar sekolah dilakukan ditempat magang
seperti dunia usaha dan industri. Pendidikan tersebut dituangkan dalam
kurikulum yang diberi nama Praktik Kerja Industri (Prakerin).
Jadi, Praktik Kerja Industri (Prakerin) adalah suatu bentuk penyelenggaraan pendidikan
professional, yang memadukan secara sistematik dan sinkron program pendidikan
di sekolah dan program keahlian yang diperoleh melalui kegiatan bekerja
langsung di dunia kerja, yang terarah untuk mencapai tingkat professional tertentu.
2.
Tujuan
Praktik Kerja Industri (Prakerin)
Tujuan Praktik Kerja Industri (Prakerin) bagi
setiap siswa yang akan menyelesaikan studinya dari SMKN 1 Natar adalah sebagai berikut:
a. Diharapkan dapat mengubah wawasan dan pengetahuan yang
berharga, dan
memperoleh masukan serta umpan balik guna memperbaiki dan mengembangkan
kesesuaian pendidikan dengan kenyataan yang ada di lapangan kerja.
b. Menyiapkan sumber daya manusia yang berkualitas
sesuai dengan tuntutan zaman dalam era informasi dan teknologi.
c. Sebagai salah satu syarat untuk menyelesaikan
pendidikan pada jusuran Teknik Elektronika Industri.
d. Mengembangkan dan memantapkan sifat profesionalisme yang
diperlukan siswa untuk memasuki lapangan pekerjaan sesuai dengan bidangnya.
e. Meningkatkan pengetahuan siswa pada aspek – aspek usaha yang profesional
dalam lapangan kerja antara lain struktur organisasi, jenjang karier, dan teknik.
f. Mendorong
siswa untuk berjiwa wiraswasta.
g. Memantapkan
disiplin dan tanggung jawab siswa dalam melaksanakan tugasnya.
h. Meningkatkan,
memperluas dan memantapkan proses penyerapan teknologi baru dari lapangan kerja
kesekolah dan sebaliknya.
i.
Mampu memahami,
memantapkan dan mengembangkan pelajaran yang diperoleh dan penerapannya didunia
kerja.
j.
Memperoleh Masukan dan
umpan balik dari dunia kerja untuk mengembangkan Program Pendidikan Kejuruan.
k. Memberikan
kesempatan kepada siswa untuk mengenal suasana/iklim lingkungan kerja yang
sebenarnya, terutama yang berkenaan dengan disiplin ilmu.
l.
Diharapkan dari hasil penulisan ini nantinya dapat
memberikan sumbangan pemikiran kepada perusahaan/industri dalam mengambil kebijakan di masa yang akan
datang dalam memberikan peluang
kerja sama.
3.
Tujuan
Pembuatan Laporan
Secara, laporan dapat
diartikan sebagai bentuk tanggung jawab dari sebuah pelaksanaan kegiatan bahan
kajian untuk mengetahui tingkat keberhasilan dari pelaksanaan suatu kegiatan
dan dalam pelaksanaan Praktik Kerja Industri (Prakerin) pembuatan laporan
bertujuan untuk:
a. Memenuhi
persyaratan atau sebagai persyaratan bagi siswa/siswi Sekolah Menengah Kejuruan
dalam menyelesaikan jejang pendidikan.
b. Melatih
dan mengetahui kemampuan siswa/siswi dalam penyusunan sebuah laporan yang
sesuai dengan ketentuan yang telah ditetapkan.
c. Sebagai
salah satu alat menyampaikan informasi dari siswa/siswi sebagai pelaksanaan Praktik Kerja Industri (Prakerin) kepada pihak sekolah
tentang tempat pelaksanaan Praktik Kerja Industri (Prakerin).
4.
Landasan
Praktik Kerja Industri (Prakerin)
Praktik Kerja Industri (Prakerin) merupakan program wajib yang harus dilaksanakan oleh
siswa – siswi SMKN 1 Natar. Ketentuan
– ketentuan tersebut tertuang di dalam undang – undang dan peraturan pemerintah
yaitu:
a. Undang – undang Nomor 2 Tahun 1989 tentang Pendidikan
Nasional.
b. PP No. 29 Tahun 1990 Tentang Pendidikan Menengah.
c. PP No. 39 Tahun 1992 Tentang Peran serta masyarakat
dalam Pendidikan Nasional.
d. Keputusan
Mendikbud No. 0490/u/1992 tentang Sekolah menengah Kejuruan.
e. Keputusan
Mendikbud No. 080/u/1993 tentang kurikulum SMK sebagai berikut:
Penyelenggaraan
Pendidikan melalui
dua jalur yaitu: Pendidikan disekolah dan Pendidikan di luar sekolah.
5.
Batasan
Masalah
Penulisan
laporan ini dibatasi pada pembuatan robot light
follower sederhana.
6.
Metode Penulisan Laporan
Penulisan
laporan yang baik harus ditunjang dengan data yang valid, actual dan factual.
Dalam pengumpulan data metode yang kami gunakan diantaranya :
a. Metode interview (Wawancara)
Yaitu
pengumpulan data yang dilakukan dengan bertanya langsung atau wawancara kepada
pihak – pihak yang berhubungan dengan dunia kerja yang dijalani diantaranya,
masyarakat sekitar, pimpinan perusahaan, staf atau karyawan kantor. Metode ini
dilakukan karena metode ini merupakan cara yang efektif dalam pengumpulan data
secara baik dan akurat.
b. Metode observasi (pengamatan secara langsung)
Observasi adalah suatu cara pengumpulan data
dengan mengadakan pengamatan langsung terhadap suatu obyek dalam suatu periode
tertentu dan mengadakan pencatatan secara sistematis tentang hal-hal tertentu
yang diamati. Banyaknya periode observasi yang perlu dilakukan dan panjangnya
waktu pada setiap periode observasi tergantung kepada jenis data yang
dikumpulkan. Apabila observasi itu akan dilakukan pada
sejumlah orang, dan hasil observasi itu akan digunakan untuk
mengadakan perbandingan antar orang-orang tersebut, maka hendaknya observasi
terhadap masing-masing orang dilakukan dalam situasi yang relatif
sama.
c. Metode study pustaka
Yaitu
suatu metode pengumpulan data dengan mempelajari buku – buku atau internet yang
berhubungan dengan penyusunan dan penulisan laporan. Buku – buku atau data yang
telah dicari dapat dipelajari dan akan menambah pengetahuan tentang dunia usaha
dan dunia industri.
Dalam hal ini kami ingi mambahas tentang Robot Light
Follower Sederhana.
7.
Sistematika
Laporan
Sistematika
laporan ini dibuat dengan tujuan untuk memberikan gambaran dan sebagai pedoman
penyusun dalam membuta laporan, kerangka karangan dalam laporan ini adalah
sebagai berikut:
a. BAB
I : PENDAHULUAN
Dalam bab ini
penulis akan menguraikan tentang pengertian Praktik Kerja Industri (Prakerin),
Tujuan Pembuatan Laporan, Tujuan Praktik Kerja Industri (Prakerin), Jumlah peserta Praktik Kerja Industri (Prakerin), Landasan Praktik Kerja Industri (Prakerin), Sejarah Singkat
berdirinya Multi Teknologi Lampung (Mutekla), Struktur Organisasi Multi Teknologi
Lampung (Mutekla), Visi dan Misi didirikannya Multi Teknologi Lampung (Mutekla),
Denah lokasi Multi Teknologi Lampung (Mutekla).
b. BAB
II : TEORI DASAR DAN PEMBAHASAN
Dalam bab ini
berisikan mengenai definisi robot light
follower sederhana, Jenis – jenis robot, Prinsip kerja robot light follower sederhana, Kegunaan IC
LM324.
c. BAB
III : PERAKITAN ROBOT LIGHT FOLLOWER
Dalam bab ini
berisikan mengenai langkah pembuatan robot light
follower sederhana dari awal hingga akhir.
d. BAB
IV : PENUTUP
Dalam bab ini
penulis akan mengambil beberapa kesimpulan dari pada pembahasan bab – bab
sebelumnya dan mencoba memberikan sedikit saran yang sekiranya dapat berguna
demi perbaikan di masa mendatang.
e. DAFTAR
PUSTAKA
f. LAMPIRAN-LAMPIRAN
8.
Peserta
Praktik Kerja Industri (Prakerin)
Peserta Prakerin adalah siswa – sisiwi SMK Negeri 1 Natar kelas XI
naik kelas XII TP. 2013/2014 dengan jumlah sebagai berikut:
Tabel 1.1 Peserta Praktik Kerja industri (Prakerin):
No
|
Program keahlian
|
Laki-laki
|
Perempuan
|
Jumlah
|
1
|
Teknik Mekanik Otomotif
|
57
|
0
|
57
|
2
|
Teknik Elektronika Industri
|
20
|
8
|
28
|
3
|
Teknik Komputer & Jaringan
|
9
|
25
|
34
|
4
|
Akuntansi
|
0
|
34
|
34
|
JUMLAH
|
153
|
|||
B.
Deskripsi
Perusahaan
1.
Profil
Perusahaan
Profil lembaga Multi Teknologi Lampung (Mutekla) adalah Lembaga
Pelatihan Elektronika dan Robotika di Provinsi Lampung yang membuka pendidikan
dan bimbingan khusus elektronika dan robotika mulai dari sekolah dasar sampai
perguruan tinggi sesuai dengan perkembangan teknologi global. Mutekla dengan
motto “Wellcome to future technology” yang dilandasi dengan jiwa kreatifitas, inovasi, dan
profesionalisme mengajak para civitas akademika untuk bersama mengembangkan
teknologi masa depan dengan riset dan penelitian terpadu yang berkesinambungan
menuju era otomasi industri. Mutekla menerapkan berbagai ilmu pendidikan dasar
yang didapatkan di sekolah seperti matematika, sains, komputer, dan seni yang
dikombinasi dengan ilmu elektronika, otomasi, dan pemrograman serta penerapan
pendidikan karakter bangsa yang membentuk insan cendikia. Mutekla menggunakan
metode pembelajaran yang bersifat terbuka dan menyenangkan dimana peserta didik
dapat meningkatkan skill dengan mendesain dan memprogram robot cerdas dengan
proses belajar step by step dengan
kombinasi modul pelatihan dan robot kit serta peralatan praktik yang lengkap
sehingga peserta didik mampu menghasilkan robot dengan ide dan kreativitasnya
sendiri. Mutekla juga mendukung dan mengakomodir peserta didik yang memiliki
inovasi lebih untuk mengikuti berbagai Kontes atau kompetisi robot lokal,
nasional, maupun internasional dari berbagai tingkatan pendidikan. Dengan
dukungan tim manajemen dan instruktur yang berpengalaman dibidangnya kami yakin
pelatihan dan pengembangan robotika yang kita mulai di Provinsi Lampung akan
mengalami peningkatan yang merata disetiap daerah agar sistem kompetisi
robotika semakin ramai dan berkualitas. Kini saatnya memperkenalkan dunia
robotika dari sekarang sebagai bagian dari pengembangan bakat dan potensi
generasi penerus bangsa.
2.
Sejarah
Perusahaan
Tahun
2002 merupakan awal lahirnya Yayasan Multi Teknologi Lampung (Mutekla) yang didirikan oleh Bapak Ramli
Jumadi, Bapak Totok Yuliantono dan sejumlah nama lain yang masuk dalam struktur
organisasi yayasan.
Awalnya
yayasan Multi Teknologi Lampung mendirikan lembaga kursus stir mobil yang
dikhususkan untuk praktik stir siswa SMKN 2 Bandar lampung, setelah
berjalan beberapa tahun kemudian atas gagasan pendiri yayasan dan Bapak
Sudarmanto, S.Kom dan Handri Supriadi, A.Md Yayasan Multi Teknologi Lampung
mendirikan Lembaga Kursus Elektronika dan Robotika pertama di Provinsi Lampung
yang memberikan pelatihan dan workshop serta menjalin kerjasama ekskul robotik
dibeberapa sekolah di Provinsi Lampung.
Mutekla
Robotik Center awalnya beralamat di Jl. ZA Pagar Alam No.20D Rajabasa Bandar
Lampung setelah setahun kemudian pindah alamat ke Gedung LPTK Mutekla (samping
kantor SMKN2) Jl. Prof. Dr. Sumantri Brojonegoro Gedung Meneng Bandar Lampung.
Gambar 1.1 Ruko bangunan LPTK Mutekla yang lama
Gambar
1.2 Ruko bangunan LPTK Mutekla yang baru
Mutekla
Robotik Center dalam kiprahnya menghantarkan beberapa sekolah unggulan dalam
meraih prestasi robotik dalam kejuaraan atau lomba lokal, nasional, bahkan
lomba internasional.
Sekarang
Mutekla juga membuka kursus atau pelatihan bahasa inggris, Jepang, Korea dan
Mandarin yang di khususkan bagi pelajar dan mahasiswa di Lampung.
3.
Visi
dan Misi Perusahaan
Visi:
Menjadi lembaga pelatihan elektronika dan robotika
profesional dengan kualifikasi dan kompetensi internasional.
Misi:
a. Mengembangkan
pendidikan teknologi elektronika dan robotika di Provinsi Lampung.
b. Mengembangkan riset
dan penelitian terpadu, berkesinambungan dan terarah secara jelas untuk
meningkatkan kompetensi dibidang elektronika dan robotika.
c. Meningkatkan dan
mengembangkan peluang kerjasama dengan sekolah dan dunia industri otomasi.
d. Meningkatkan banding
Mutekla dengan menjaga kualitas pendidikan dan pelatihan Elektronika dan
Robotika yang berdaya saing.
e. Meningkatkan skill
peserta didik agar berprestasi dan menjadi kebanggaan masyarakat.
4.
Struktur
Organisasi Perusahaan
Pembina
Ramli
Jumadi, S.Pd., ST
Totok
Yuliantono, ST
|
Direktur
Handri
Supriadi, A.Md
|
Wakil Bidang
Humas
Sudarmanto,
S.Kom
|
Wakil Bidang
IPTEK dan Pengembangan
Pujar
Diki, S.Kom
|
Sekretaris
& Admin
Feri
Napolion, S.Pd.I.
|
Marketing
dan Pemasaran
Prayogi
|
Gambar
1.3 Struktur Organisasi LPTK Mutekla
5.
Produksi
/ Jasa
Produksi
LPTK MUTEKLA adalah produksi yang menghasilkan sebuah karya seperti:
a. Robot
Line Follower
b.
Robot Light Follower
c. Robot
Pemadam Api
d. Dan
Lain – lain.
Sedangkan Jasa LPTK MUTEKLA adalah:
a. Bimbingan
belajar bahasa asing (kursus)
b. Pembuatan
pesanan alat seperti:
1) Alat
pendeteksi tanah longsor
2) Alat
pendeteksi suhu
3) Dan
Lain – lain.
c. Dan
Lain – lain.
6.
Lokasi
Perusahaan
Denah Lokasi Perusahaan
LPTK MUTEKLA (Multi
Teknologi Lampung)
Gambar 1.4 Denah Lokasi Perusahaan
BAB II
TEORI DASAR
A.
Pengertian
Robot Light follower Sederhana
Sebelum
masuk
kedalam pembahasan. Maka, saya akan membahas tentang apa itu robot terlebih
dahulu. Kata Robot berasal dari bahasa Czech “robota” yang
artinya pekerja budak. Istilah robot dikenalkan oleh Karel Capek pada tahun
1921. Penggunaan kata robot dikenalkan oleh Capek dengan menjadikannya kata itu
nama perusahaannya, Rossum Universal Robot (RUR) pada bulan Januari
1921.
Robot ialah suatu mesin yang
dirancang untuk membantu atau menggantikan peranan manusia dalam mengerjakan
beberapa tugas secara otomatis dengan seminimal mungkin mendapat interfensi
dari luar, dan robot juga dirancang untuk dijadikan sebuah karya dalam
perlombaan.
1. Jenis
Robot Berdasarkan Bentuknya:
a.
Turtle robot
Bentuk robot ini mirip rumah kura – kura.
b.
Vehicle robot
Bentuk robot ini seperti sebuah mobil yang mampu di
program.
c.
Rover robot
Bentuk robot ini biasanya dibuat untuk keperluan
“penjelajah” seperti penjelajah planet mars (robot sprit milik NASA).
d.
Walker robot
Bentuk robot ini mirip serangga dan dilengkapi
dengan 4 kaki atau lebih.
e.
Arm robot
Bentuk robot ini berupa lengan yang biasa digunakan
untuk mengambil dan memindahkan barang
f.
Android robot
Bentuk robot ini didesain menyerupai manusia di
lengkapi dengan berbagai sensor.
Light
follower
merupakan jenis Vehicle robot yang bergerak otonom mengikuti
cahaya yang diarahkan kebagian sensor pada rangkaiannya. Sensor akan mendeteksi
besar-kecilnya intensitas cahaya yang diterimanya, kemudian diteruskan kebagian
selanjutnya (transistor) untuk diolah dan menentukan tindakan yang akan
dilakukan. Sistem penggerak pada robot light follower ini menggunakan motor DC
untuk menggerakkan roda yang akan menjalankan robot sesuai dengan arah cahaya
yang diterima oleh sensornya.
B.
Tahap
– tahap Pembuatan Robot Light follower
Sederhana
Secara
garis besar, tahapan pembuatan robot light
follower sederhana ada tiga tahap robot
yaitu:
1.
Perencanaan, meliputi:
pemilihan hardware dan design.
2.
Pembuatan, meliputi
pembuatan mekanik, elektonik, dan program (yang menggunakan program)
3.
Uji coba.
C.
Prinsip
Kerja Robot Light follower Sederhana
Transistor
sebagai switching
|
Sensor
|
komparator
|
Transistor
sebagai switching
|
Mekanik
|
Gambar
2.1 Blok Diagram
Gambar
2.2 Skema Rangkaian
Prinsip kerja dari rangkaian light follower sederhana tersebut berupa
robot yang akan diperintahkan guna mengikuti sebuah cahaya bantu dengan cara
yang cukup sederhana. Dan dengan cara ini kita bisa membuat rangkaian light follower sederhana ini dengan
mudah. Ditambah lagi dengan banyaknya komponen yang dapat beli di beberapa toko
elektronik. Berikut beberapa penjelasan yang mengenai komponen di dalam
rangkaian light follower sederhana ini.
1. Komponen
Sensor
Komponen ini
memang memiliki fungsi untuk mengubah varian masukan atau input mulai dari
suara hingga panas menjadi tegangan atau aliran arus. Dan di dalam rangkaian light follower ini, sensor yang akan berfungsi sebagai indera pada
manusia. Sensor akan memerintahkan robot untuk mengikuti cahaya yang
terdeteksi. Lampu LED di dalam
rangkaian ini akan berfungsi sebagai transmitter atau Photodiode yang berguna
menerima pesan.
Sensor yang digunakan sebagai
pendeteksi atau peneriman (receiver) cahaya pada robot light follower berupa sensor cahaya
seperti LDR, photodioda, phototransistor, dan lain – lain. Dan untuk robot light follower yang saya buat
menggunakan photodioda sebagai sensornya.
Konsep robot yang akan dibuat kali ini adalah Light Following Robot. yaitu robot
pengikut cahaya dimana jika ada cahaya yang lebih dibanding cahaya ruangan maka
robot akan mengikuti kemana arah cahaya itu.
Sensor photodioda ini nilai
resistansinya akan berkurang bila terkena cahaya dan bekerja pada kondisi
reverse bias.
a. Jika photodioda terkena cahaya, maka
nilai resistansinya akan menjadi kecil dan photodioda akan bersifat
sebagai sumber tegangan. Sehingga akan ada arus yang mengalir ke
transistor dan berlogika 1.
b. Jika photodioda tidak terkena
cahaya, maka nilai resistansinya akan besar atau dapat kita asumsikan tak
hingga. Sehingga arus yang mengalir pada transistor sangat kecil dan berlogika
0.
Gambar 2.3 Sensor Photodioda
Maka V – out sensor yang masuk pada
komparator (V – in) akan dibandingkan dengan tegangan referensi (dalam hal ini
Tegangan Variable Resistor (VR). Pada
rangkaian komparator LM324 kali ini menggunakan komparator mode non-inverting sehingga saat V – in
(output sensor) lebih besar dari V – referensi maka V – out ≈ VCC. Dan
sebaliknya jika saat V – in (output sensor) lebih kecil dari V – referensi maka
V – out ≈ GND.
2.
Komponen Prosessor
Di dalam
rangkaian ini terdapat IC LM 324. IC yang digunakan sebagai komparator, yaitu membandingkan antara tegangan input dari sensor dengan tegangan input
dari variable resistor. Pulsa outputnya tinggi sehingga tidak diperlukan adanya
pull-up pada rangkaian output. IC LM324 ini bertugas mengubah sinyal yang akan
didapatkan dari sensor yang diubah menjadi sinyal digital. Cara ini juga biasanya
juga dimanfaatkan sebagai ADC untuk beberapa rangkaian elektronika yang
membutuhkan tegangan digital.
Cara
menggunakan Op – Amp sebagai komparator
(Pembanding).
{kind=link}
Gambar 2.4
Op – Amp sebagai Komparator
jika
tegangan yang di berikan ke input non inverting
itu lebih besar dari tegangan yang diberikan ke input inverting, maka output akan mengeluarkan logika 1 (High). Sedangkan jika tegangan yang
diberikan ke input inverting itu lebih besar dari tegangan yang diberikan ke
input non inverting, maka output akan
mengeluarkan logika 0 (Low).
Gambar 2.5
Bagian Penguat dan pembanding (komparator)
3. Transistor
Sedangkan transistor akan ditugaskan untuk saklar on/off atau switching di dalam rangkaian light follower sederhana ini.
Sedangkan transistor akan ditugaskan untuk saklar on/off atau switching di dalam rangkaian light follower sederhana ini.
Gambar 2.6
rangkaian switching pada IC dan Motor
4. Dinamo
Tentu saja
tugas dinamo untuk menggerakkan rangkaian light
follower sederhana tersebut. Ada berbagai macam dinamo yang bisa digunakan
dirangkaian light follower tersebut.
Apalagi dinamo Tamiya sendiri juga sudah banyak ditemukan dengan mudah.
5. Trimpot
Potensiometer adalah
resistor tiga terminal dengan sambungan geser yang membentuk pembagi tegangan
dapat disetel. Jika hanya dua terminal yang digunakan (salah satu terminal
tetap dan terminal geser), potensiometer berperan sebagai resistor variabel
atau Rheostat.
Potensiometer
yang digunakan adalah 20K.
BAB III
MERAKIT ROBOT LIGHT
FOLLOWER SEDERHANA
Pada
dasarnya merakit robot itu cukup mudah, hanya saja dibutuhkan ketelitian saat
mengerjakannya, Sehingga hasilnya dapat memuaskan diri kita. Namun, sebelum
merakit robot kita harus menyiapkan seperti:
A.
Alat
dan Bahan
Dalam
merakit Robot Light Follower, maka dibutuhkan alat dan bahan. Antara lain:
1.
Alat
a. Obeng
+ dan Obeng –
Adalah alat yang berfungsi untuk mengencangkan
dan mengendorkan skrup.
Gambar
3.1 Obeng + dan Obeng –
b. Multimeter
Adalah alat yang berfungsi
untuk melakukan pengukuran terhadap besaran-besaran listrik seperti tegangan,
arus dan hambatan. Didalam multimeter terdapat Voltmeter, Amperemeter dan
Ohmmeter. Multimeter juga bisa digunakan untuk mengecek sebuah komponen masih
baik atau tidak. Cara pengecekan komponen tentunya mengacu pada datasheet dan
karakteristik komponen masing-masing.
Ada dua
jenis multimeter yang umum dipakai oleh para teknisi elektronika, yaitu
multimeter analog dan multimeter digital. Multimeter analog menggunakan
pembacaan dengan sistem jarum penunjuk, sedangkan multimeter digital menggunakan
penunjuk angka.
Gambar 3.2 Multitester
Analog
Gambar 3.3 Multitester
Digital
c. Solder
Adalah alat yang berfungsi memanaskan timah
solder saat proses penyambungan atau pelepasan kabel atau komponen. Prinsip
kerja solder tangan menggunakan sebuah elemen pemanas seperti setrika, kemudian
panas yang dihasilkan dialirkan menuju ujung atau tip solder. Selanjutnya tip
solder inilah yang kita gunakan untuk memanaskan timah pada benda kerja.
Gambar
3.4 Solder
d. Atraktor
Adalah alat yang digunakan
untuk menyedot timah dari PCB.
Gambar 3.5 atraktor
Cara
menggunakan atraktor cukup mudah, yaitu dengan dipompa lebih dahulu lalu
dilepaskan tepat pada posisi dekat timah yang sudah dipanaskan.
e. Pinset
Adalah alat yang berfungsi
memegang komponen saat proses pemasangan maupun proses penyolderan. Jika tang
lancip digunakan untuk komponen yang relatif besar, maka pinset ini digunakan
pada komponen yang relatif besar dan bahkan sulit untuk dipegang dengan tangan.
Gambar 3.6 Pinset
Selain
berfungsi sebagai pemegang, penggunaan pinset juga dimaksudkan untuk mengurangi
panas yang mengalir ke bodi komponen saat proses penyolderan.
f. Tang
Kombinasi
Tang kombinasi digunakan untuk
memegang, memuntir dan memotong benda kerja, misal kawat penghantar (kabel).
Penggunaan tang kombinasi tidak boleh memotong kabel dengan cara tang
dipukul dengan palu, karena akan merusak palu
Gambar
3.7
Tang Kombinasi
g. Penggaris
Baja
Terbuat dari bahan stainless stell dan mempunyai
ukuran dalam mm dan inchi, digunakan sebagai rata - rata atau memeriksa rata
dan tidaknya suatu benda
Gambar
3.8
Penggaris Baja
h.
Tang potong
Tang potong khusus dipakai untuk
memotong kawat/kabel.
Gambar 3.9 Tang potong
i.
Tang Pengupas
Biasanya digunakan untuk
mengelupas isolasi kabel.
untuk mengelupas kabel ukuran kecil, maka dapat menggunakan alat kusus pengupas kabel.
untuk mengelupas kabel ukuran kecil, maka dapat menggunakan alat kusus pengupas kabel.
Gambar 3.10 Tang Pengupas
j.
Tang Jepit
Tang jepit adalah tang yang mempunyai
fungsi untuk meluruskan kaki komponen elektronika dan juga untuk
menjepit kaki komponen pada saat penyolderan
untuk menghidari panas pada komponen
yang disolder.
Gambar 3.11 Tang jepit
k.
Bor
Bor dipergunakan untuk membuat lubang baik dari
kayu maupun logam. Menurut jenisnya ada 2 macam bor, yaitu bor tangan dan bor
listrik.
Gambar 3.12 Bor
l.
Lem bakar
Lem
lilin atau lem tembak atau lem bakar merupakan jenis lem yang harus dipanaskan
dahulu sebelum di gunakan. Bentuknya lem bakar ini dalam suhu ruangan adalah
berupa padatan berbentuk batang silinder panjang. Lem bakar ini biasa digunakan
dengan menggunakan alat pemanasnya yang bentuknya menyerupai tembakan atau
dalam keadaan terbatas, tanpa tembakan. Lem bakar ini biasa digunakan untuk
mengelem suatu benda.
Gambar 3.13 lem
bakar
2.
Bahan
a.
Timah Solder
Adalah
timah yang dibuat dalam bentuk kawat untuk menghubungkan komponen, pcb dan
kabel saat perakitan elektronika. Timah solder biasanya dibuat dengan diameter
tertentu seperti 0.8mm, 1mm dan 2 mm. Timah solder akan meleleh pada suhu
tertentu dan melekat pada permukaan kaki komponen, kabel atau PCB yang akan
dihubungkan.
{kind=link}
Gambar 3.14 Timah Solder
Dulu,
timah solder dibuat dari pencampuran bahan timah hitam dan timah putih dengan
perbandingan tertentu misalnya 60/40. Kini sudah ada timah solder yang lebih
ramah lingkungan dan bebas timah hitam yang dikenal dengan istilah Lead free
yang berarti bebas timah hitam.
b. Printed Circuit Board
Adalah
singkatan dari printed circuit board. PCB merupakan tempat untuk menaruh
komponen yang dirangkai berdasarkan jalur tertentu sesuai dengan skema
rangkaian. PCB terbuat dari bahan pertinak atau fiber. Pada permukaan PCB
dilekatkan sebuah penghantar dari tembaga atau perak atau yang lainnya.
Gambar 3.15 PCB Bolong
dan PCB Polos
c.
RESISTOR
Resistor berfungsi untuk menahan arus listrik dan mengubah arus menjadi energi panas. Resistor ada 2 macam yaitu:
− Resistor tetap adalah resistor yang mempunyai nilai tahanan tetap tidak berubah dan nilai tahananya dicantumkan dengan kode warna, biasanya melingkar pada badan resistor.
− Resistor variable adalah resistor yang mempunyai nilai tahanan tidak tetap, bisa berubah sesuai dengan nilai yang diperlukan.
Resistor berfungsi untuk menahan arus listrik dan mengubah arus menjadi energi panas. Resistor ada 2 macam yaitu:
− Resistor tetap adalah resistor yang mempunyai nilai tahanan tetap tidak berubah dan nilai tahananya dicantumkan dengan kode warna, biasanya melingkar pada badan resistor.
− Resistor variable adalah resistor yang mempunyai nilai tahanan tidak tetap, bisa berubah sesuai dengan nilai yang diperlukan.
Gambar 3.16 Resistor
d.
Transistor
Transistor adalah komponen elektronika yang nilai tahananya dapat berubah-ubah.
Transistor adalah komponen elektronika yang nilai tahananya dapat berubah-ubah.
Table 3.1 Transistor:
e.
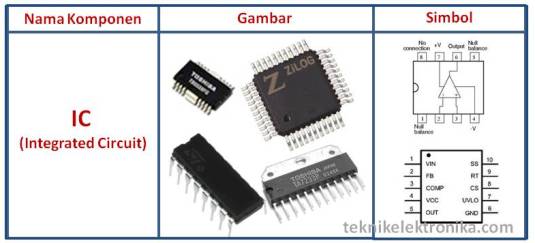
IC (Integrated Circuit)
Adalah Komponen Elektronika Aktif yang terdiri
dari gabungan ratusan bahkan jutaan Transistor, Resistor dan komponen lainnya
yang diintegrasi menjadi sebuah Rangkaian Elektronika dalam sebuah kemasan
kecil. Bentuk IC (Integrated Circuit) juga bermacam-macam, mulai dari yang
berkaki 3 (tiga) hingga ratusan kaki (terminal). Fungsi IC juga beraneka ragam,
mulai dari penguat, Switching, pengontrol hingga media penyimpanan. Pada
umumnya, IC adalah Komponen Elektronika dipergunakan sebagai Otak dalam sebuah
Peralatan Elektronika. IC merupakan komponen Semi konduktor yang sangat
sensitif terhadap ESD (Electro Static Discharge).
Sebagai Contoh, IC yang berfungsi sebagai Otak pada sebuah Komputer yang disebut sebagai Microprocessor terdiri dari 16 juta Transistor dan jumlah tersebut belum lagi termasuk komponen – komponen Elektronika lainnya.
Sebagai Contoh, IC yang berfungsi sebagai Otak pada sebuah Komputer yang disebut sebagai Microprocessor terdiri dari 16 juta Transistor dan jumlah tersebut belum lagi termasuk komponen – komponen Elektronika lainnya.
Table 3.2 IC (Integrated Circuit) :
{kind=link}
f.
Acrylic
Adalah plastic transparan yang menyerupai kaca. Acrylic
bersifat keras, ringan dan mudah di bentuk dengan cara pemanasan.
Gambar 3.17 Acrylic
g.
Fotodioda
Fotodioda komponen elektronik yang terbuat dari bahan semi
konduktor yang digunakan sebagai sensor cahaya.
Gambar 3.18 Fotodioda
h.
Motor
DC
Merupakan motor elektrik yang bekerja pada arus searah.
Gambar 3.19 Motor DC
i.
LED (Light Emitting
Dioda)
LED
(Light Emitting Dioda) adalah dioda yang dapat memancarkan cahaya pada saat mendapat
arus bias maju, yang biasa digunakan sebagai lampu indicator sumber.
Gambar 3.20
LED (Light Emitting Dioda)
j.
Socket IC
Digunakan untuk melindungi IC pada saat penyolderan dan
mudah menganti bila terjadi kerusakan, jadi saat penyolderan IC tidak langsung
terpasang pada rangkaian tapi socket terlebih dahulu.
Gambar 3.21 Socket IC
k. Trimpot
Digunakan pada rangkian sensor light Follower Robot,
biasanya yang dipakai bernilai 20K.
Gambar
3.22 Trimpot
l.
Header Male
Header Male adalah pin
yang berbentuk seperti tusuk. Male biasanya terbuat dari logam dan mempunyai
rumah sendiri yang disebut dengan housing. Digunakan
untuk menyambungkan sebuah kabel dengan bantuan kabel.
Gambar 3.23 Header Male
Gambar 3.24 Konektor
Black Housing Dan Konektor Putih
B.
Langkah – langkah
Pembuatan Robot Light Follower Sederhana
1.
Siapkan ukuran
komponen yang akan digunakan seperti:
a.
R1 =
10K
b. R2 = 330
c. R3 = 330
d. R4 = 20-50K/Trimpot
e. R5 = 10K
f. R6 = 330
g. R7 = 330
h. R8 = 20-50K/Trimpot
i.
Q1-Q2 =
BC548 Transistor
j.
T2-T3 =
D400 Transistor
k. IC = LM324
l.
D1-D2 =
Photodioda
m. LED1-LED2 = Lampu LED Merah
n. Motor DC 3Volt = 2 unit
(bisa menggunakan dynamo
mainan/mobilan anak-anak yang berbaterai 2 unit AA)
o.
Tempat Baterai isi 4= 1 unit
p.
Dudukan baut 3 mm
2.
Buatlah layout Robot
Light follower secara manual maupun menggunakan software Diptrace, wizard,
liveware, eagle, designer dll. Seperti gambar
rangkaian di bawah ini:
Gambar 3.25 skema rangkaian robot
light follower sederhana
Gambar
3.26 Contoh layout tampak
atas dan tampak bawah
3.
Print layout
menggunakan printer serbuk
Namun
sebelum di print, layout tampak atas maupun tampak bawah harus di miror
terlebih dahulu. Gunanya, agar pada waktu di setrika gambar rangkaian tersebut
tidak terbalik. Seperti gambar di bawah ini:
Gambar
3.27 Contoh layout tampak
atas dan tampak bawah yang sudah di miror
4.
Buat PCB
Yaitu
membuat layout pada papan PCB nya langsung. Baik dengan manual, setrika maupun di sablon. Contoh
gambar menggunakan setrika.
Gambar
3.28 Membuat PCB dengan di setrika
5.
Bor PCB
Yaitu
melubangi sebuah papan PCB yang sudah ditentukan pada gambar layout.
Gambar
3.29 Mengebor PCB
6.
Desain papan fiber
sesuai keinginan
Yaitu
membuat desain atau pola dengan berbagai bentuk agar lebih menarik pada Robot
Light Follower. Desain ini kita buat untuk memasang rangkaian agar dapat
digabungkan dengan roda dan terlihat lebih rapih.
7.
Memasang komponen atau
menyolder
Gambar
3.30 Memasang atau
Menyolder Komponen
8.
Satukan roda dengan
rangkaian seperti dibawah ini:
Gambar 3.31 Robot
yang telah disatukan
9.
Uji coba
Gambar
3.32 Uji coba
10. finising
BAB IV
PENUTUP
A.
KESIMPULAN
Light
Follower merupakan robot yang bergerak otonom mengikuti cahaya yang diarahkan
kebagian sensor pada rangkaiannya. Cara kerja robot pengikut cahaya yaitu dimana jika ada
cahaya yang lebih dibanding cahaya ruangan maka robot akan mengikuti kemana
arah cahaya itu. Sebab Jika photodioda terkena cahaya, maka
nilai resistansinya akan menjadi kecil dan photodioda akan bersifat
sebagai sumber tegangan. Sehingga akan ada arus yang mengalir ke
transistor dan berlogika 1, begitupun sebaliknya. Rangkaian Robot light Follower sederhana terdiri dari tiga bagian
utama, yaitu rangkaian sensor, rangkaian komparator (pembanding) dan rangkaian driver.
B.
SARAN
– SARAN
1.
Dalam membuat Robot light follower kita harus memahami
peralatan, komponen yang digunakan dan cara pembuatannya.
2.
Dalam membuat Robot light follower kita harus
memperhatikan keselamatan dan kesehatan kerja (K3).
3.
Dalam membuat Robot light follower kita harus sesuai
dengan standar operasional prosedur (SOP).
DAFTAR PUSTAKA
LAMPIRAN
Gambar
Membuat PCB
Gambar
hasil Layout PCB
Gambar
hasil pemasangan komponen dan pemasangan kerangka pada robot
Gambar
IC dan Datasheet IC
NILAI PRAKERIN
DAFTAR NILAI PRAKERIN DARI INSTANSI/INDUSTRI PERUSAHAAN
NAMA :
KEAHLIAN :
ASPEK PENILAIAN
|
NILAI
|
DISIPLIN
|
|
KERJASAMA
|
|
INISIATIF
|
|
KERAJINAN
|
|
PRESTASI
|
|
TANGGUNG JAWAB
|
|
PENGETAHUAN
|
|
KETERAMPILAN
|
|
JUMLAH
|
|
RATA – RATA
|
Nilai
|
Predikat
|
9.0 – 10
|
Baik Sekali
|
8.0 – 8.9
|
Baik
|
7.0 – 7.9
|
Cukup
|
6.0 – 6.9
|
Kurang
|
0 – 5.9
|
Sangat kurang
|
KETIDAKHADIRAN
|
|||
ALPA
|
SAKIT
|
IZIN
|
JUMLAH
|
......,
.........................., 2016
Pemimpin Perusahaan Pembimbing
Perusahaan
(..................................) (.....................................)